





















Semua produk
-
Penglihatan Malam Inframerah Genggam Multifungsi
-
Robot Pembuangan Senjata Peledak
-
Robot Pengintai Miniatur
-
Penglihatan Malam Digital Monokular
-
Perangkat Penglihatan Malam Digital
-
Anti Sniper
-
Radar Portable
-
Lampu senter merekam patroli
-
Peralatan Operasi Khusus Taktis
-
Lingkup Senapan
-
Pengukur Jarak Laser
-
Model Militer
-
Peralatan taktis
-
Umpan yang Bisa Dibungkus
Desain Robotic Arm Remote Control Hound-II EOD Robot


| Tempat asal | Cina |
|---|---|
| Nama merek | Particle |
| Nomor model | REOD500 |
| Kuantitas min Order | 1 |
| Harga | $205,761 |
| Kemasan rincian | Naik Tangga |
| Syarat-syarat pembayaran | T/T |

Hubungi saya untuk sampel gratis dan kupon.
Ada apa:0086 18588475571
Wechat wechat: 0086 18588475571
skype: sales10@aixton.com
Jika Anda memiliki masalah, kami menyediakan 24 jam bantuan online.
xDetail produk
| Lengan Manipulator | Ya. | Suhu operasi | -40℃~+50℃ |
|---|---|---|---|
| Kontrol jarak jauh | Ya. | Naik Tangga | ≥45° |
| Kedalaman pasang | ≥200mm | Daya Tahan Baterai (Suhu normal) | ≥3j |
| Ukuran Robot | ≤950×650×650mm(Tersimpan Sepenuhnya) | Berat robot | ≤50kg(Berisi dua set baterai) |
| Kecepatan maksimum | ≥2m/s(5 gigi, variabel kontinu) | Mengatasi Kekuatan Hambatan | ≥400MM |
| Sepanjang Lebar alur | ≥400MM | Kemampuan menanjak | ≥45° |
| Daya Tahan Baterai (Suhu Normal) | ≥3j | Panjang lengan | 2000mm |
| Berat Pengambilan Maksimum | ≥40kg | Cakar | 2 |
| Sendi yang Dapat Digerakkan | 8 | Ukuran pengontrol | ≤270mm×170mm×100mm |
| Berat pengontrol | ≤1,2kg (Tanpa ransel) | Layar Tampilan Pengontrol | LCD 7'' |
| Tampilan Video | 7 saluran, salah satunya memiliki fungsi zoom fokus otomatis | Metode operasi | Dual-mode Operasi dari tombol Rocker dan layar sentuh |
| Metode Kontrol | Kontrol kabel ≥ 100m (Kabel standar), Kontrol nirkabel ≥ 1000m (Luar ruangan) | Kelas IP Platform Robot | IP66 |
| Kelas IP Lengan | IP66 | Suhu penyimpanan | -45℃~+60℃ |
| Menyoroti | Robot EOD Hound-II,IP66 EOD Robot,Eod robot 2000mm |
||
Deskripsi Produk
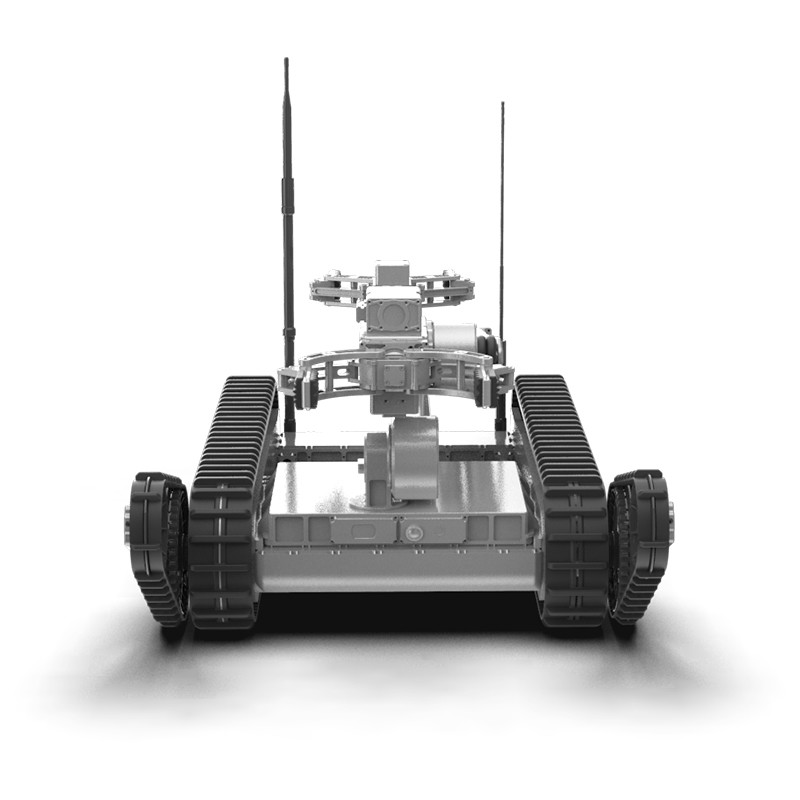
Desain lengan robot Remote Control Hound-II EOD Robot
|
Aplikasi JP REOD500 mewarisi konsep desain avant-garde dari robot seri Hound.Kombinasi crawler utama dan crawler rintangan swing-arm secara signifikan meningkatkan kemampuan robot untuk melewati rintanganDesain canggih ini memastikan bahwa JP REOD500 dapat menavigasi medan yang menantang dengan mudah, menjadikannya pilihan yang ideal untuk operasi EOD di lingkungan yang beragam.
Fungsi Kontrol jarak jauh untuk mendekati tempat kejadian berbahaya, menyelidiki sumber bahaya potensial, mengambil tindakan pembuangan atau memindahkan bahaya sesuai dengan tujuan misi,Melindungi pekerja garis depan dan masyarakat dari cedera pribadi.
Fitur 1. Desain lengan mekanik yang ditingkatkan, sangat meningkatkan kinerja pegangan; ★2. desain paten "2-kelinci", beberapa tugas dapat diselesaikan sekaligus; 3. Operasi dual-mode grafis, pengalaman operasi yang nyaman dan andal; ★4. remote 3D real-time display, operasi halus di depan mata Anda; ★5. Desain kontrol "preset" cerdas, pengaturan postur kerja yang dipersonalisasi; ★6. "X-Y-Z" tiga dimensi ruang desain robot lengan linkage berdasarkan perhitungan otomatis membantu Anda untuk mengontrol dengan tepat; 7. gambar video 7-saluran, perspektif pengamatan yang lebih kaya; 8. Desain lengan robot dengan 8 derajat kebebasan, kontrol yang lebih fleksibel; 9. Berbagai alat ekspansi dapat dengan cepat diganti untuk dengan tenang menangani berbagai kondisi kerja;
Parameter teknis
REOD500 Rincian
|
Rekomendasi Produk